I am fascinated with the flexibility of industrial 6-Axis robots. Their ability to perform a variety of complex tasks inspired me to delve into the mechanics and systems behind them. Innovative and experimental Additive manufacturing techniques such as Non-Planar and Multi-Planar printing are powerful approaches for producing complex geometries. Robotic arm systems offer an agile platform for implementation.
Exposure and access to these strategies are limited on both a hardware and software level. My goal was to make experimentation with these tools more accessible for greater adoption and innovation.
The following page documents my attempts to understand and scaffold scripts and modules for Additive and Subtractive manufacturing with 6-Axis robots.
This is a continual Work-In-Progess
Sketching to Scripting
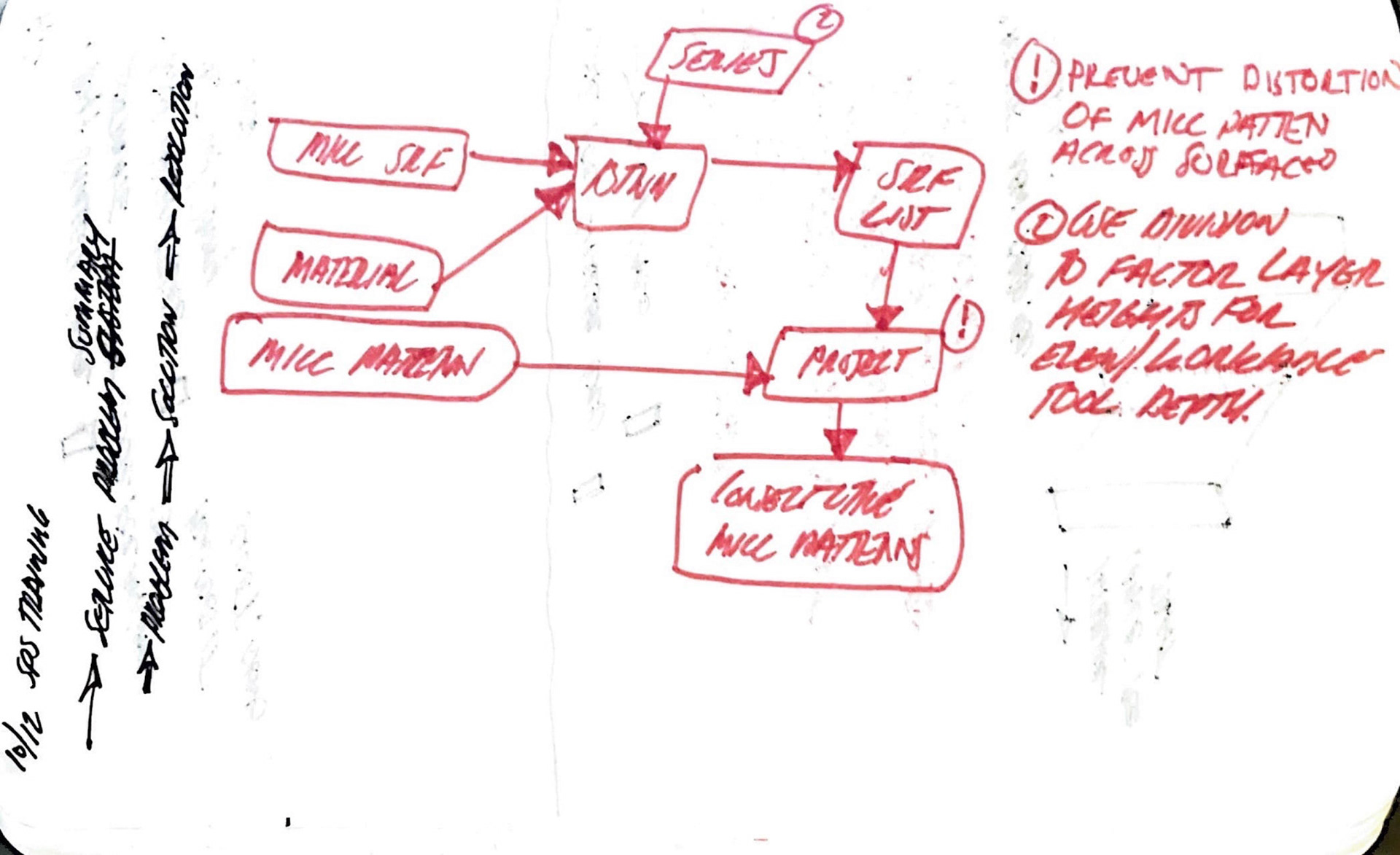
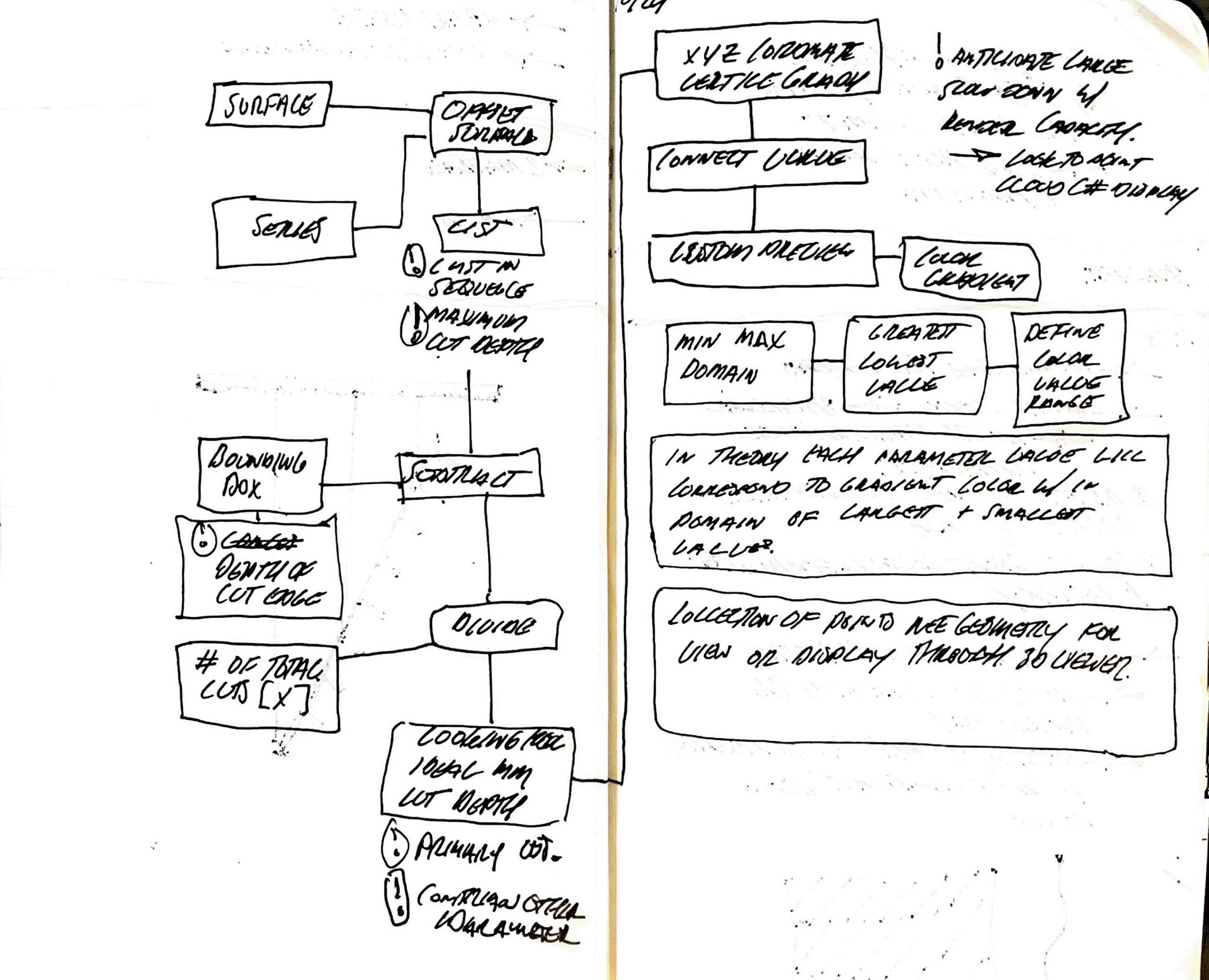
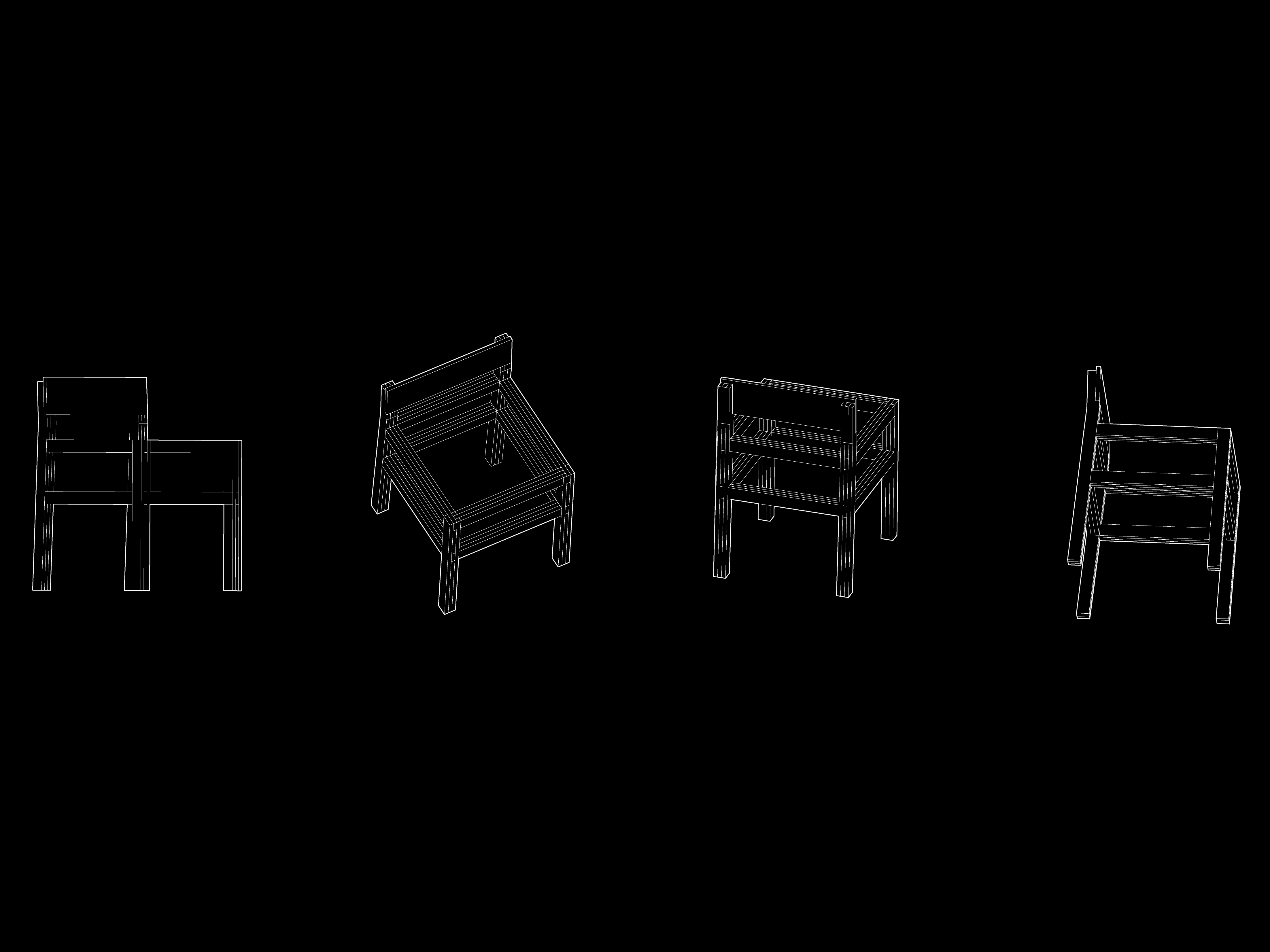
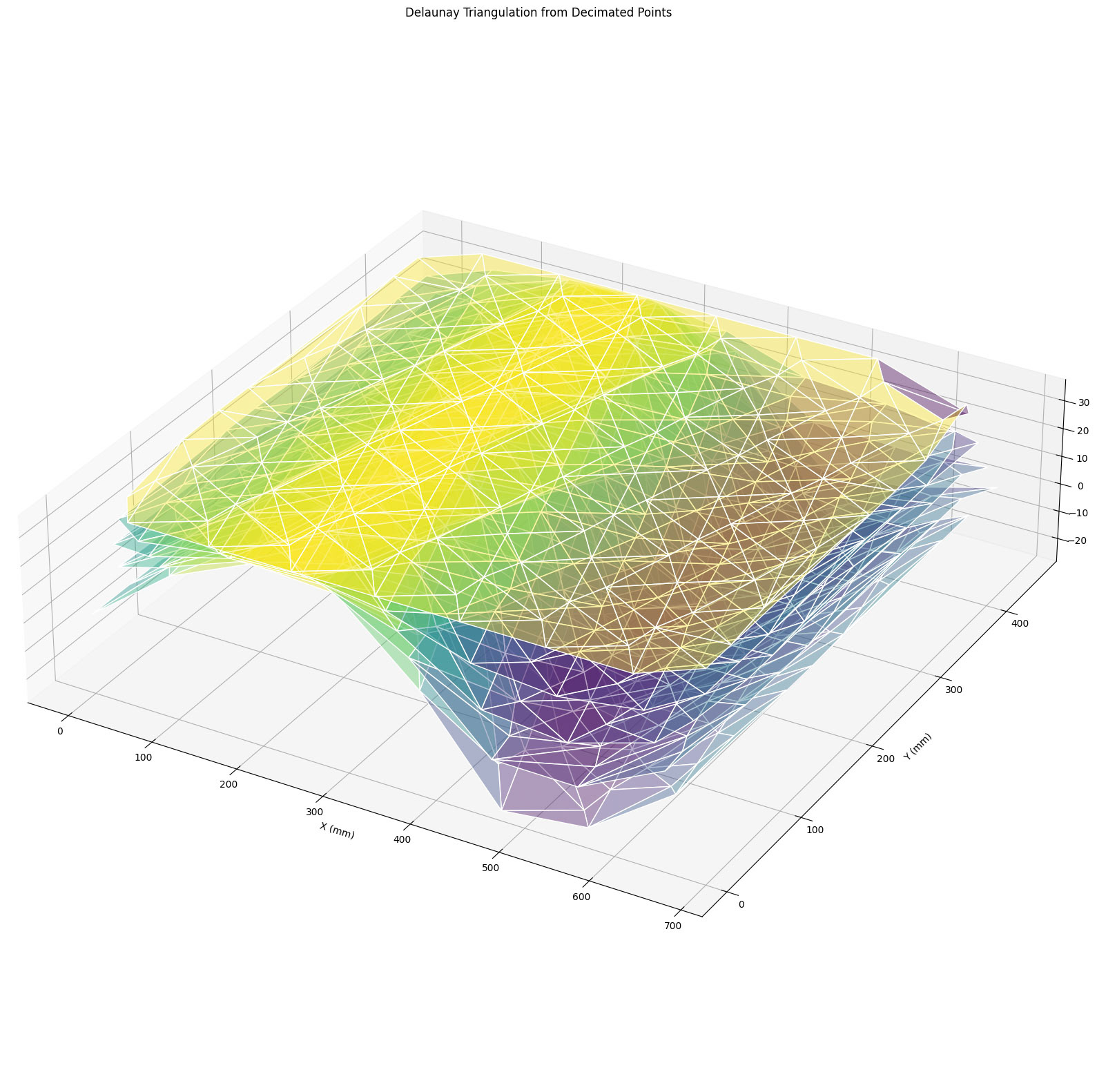
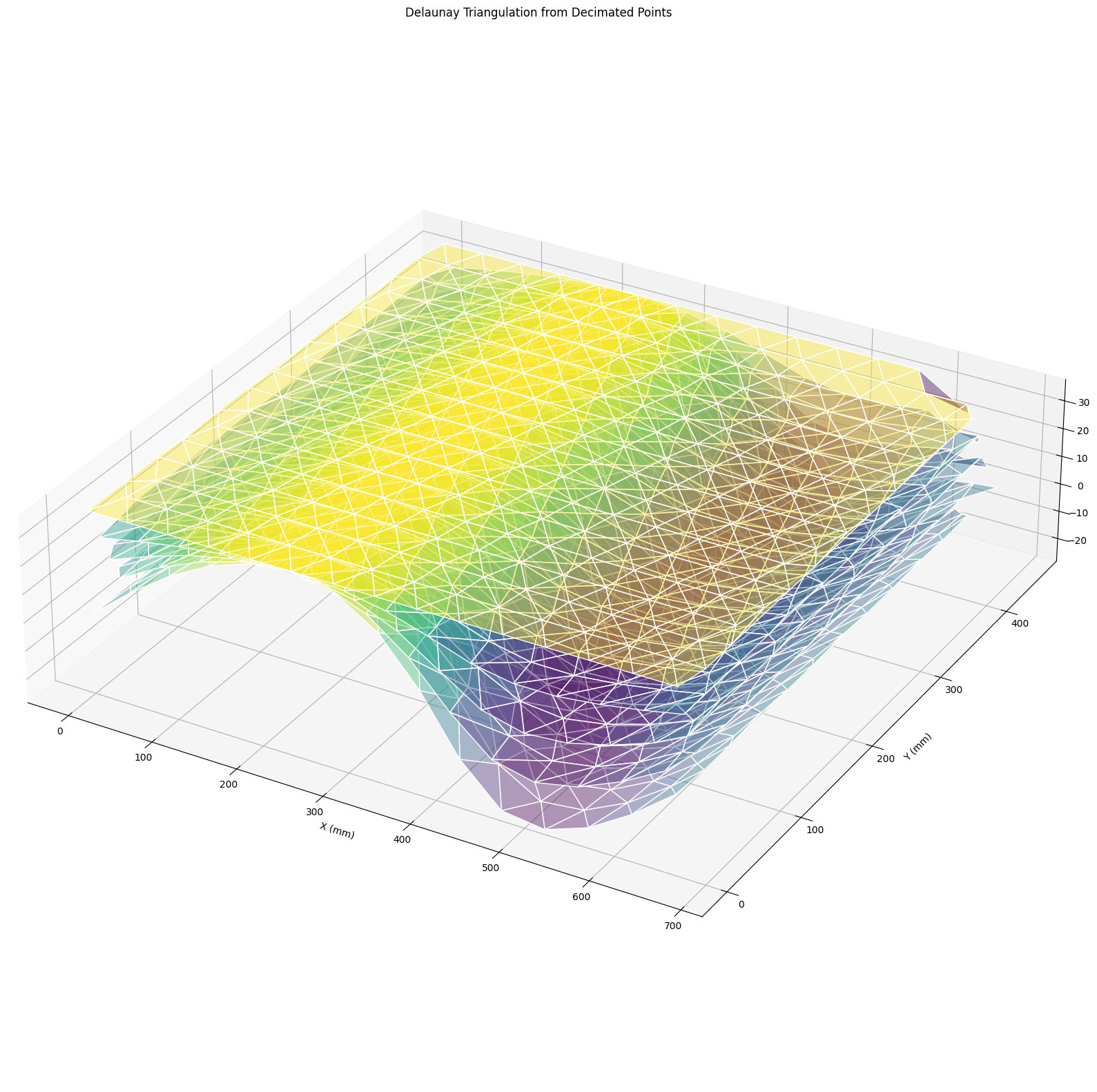
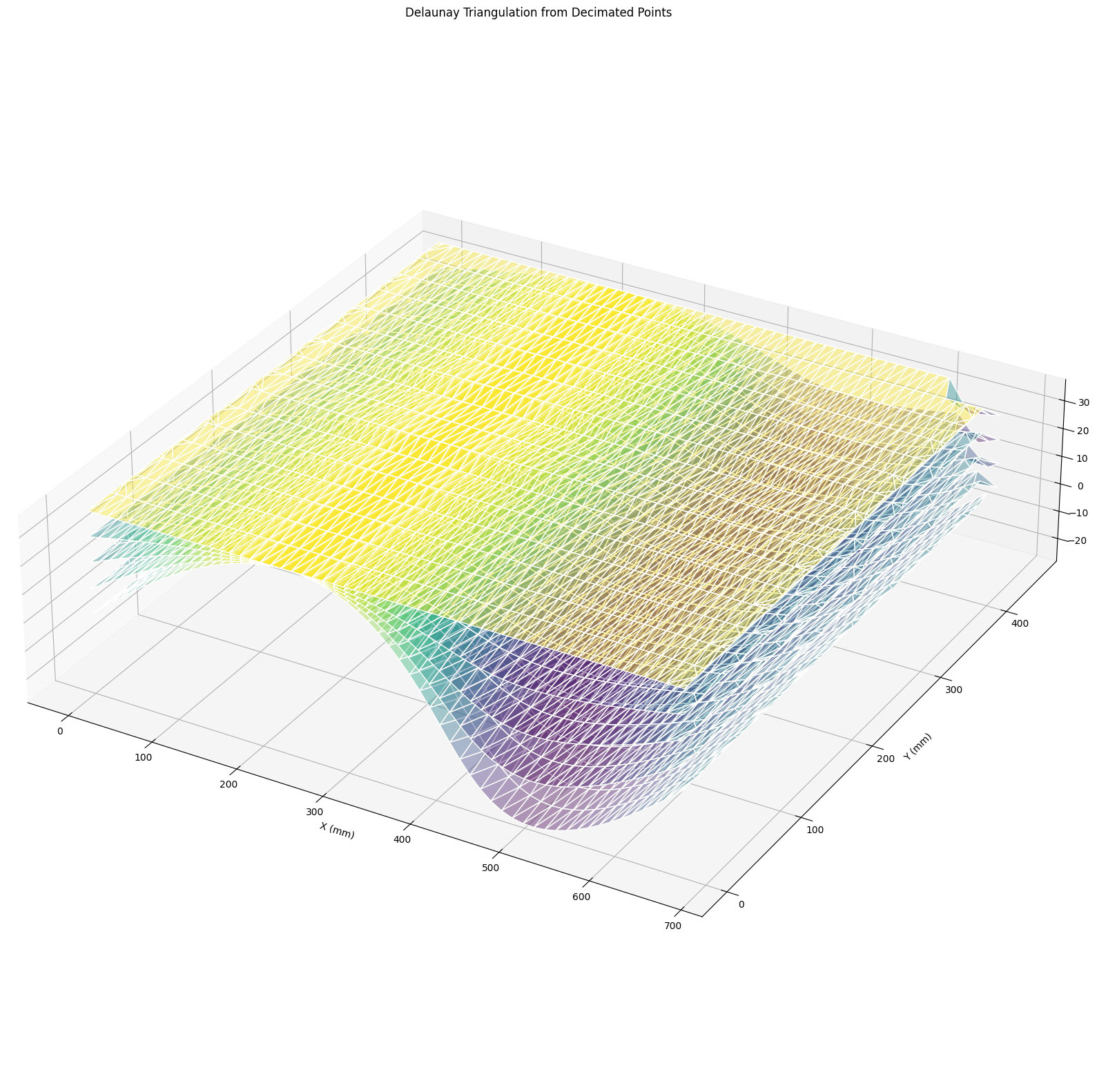
Interpreting Geometry
Implementing Non-Planar toolpath strategies involves extracting and interpreting geometrical information embedded in 3D models. This stage is crucial for utilizing the full range of movement possible with 6+ Degrees of Freedom.
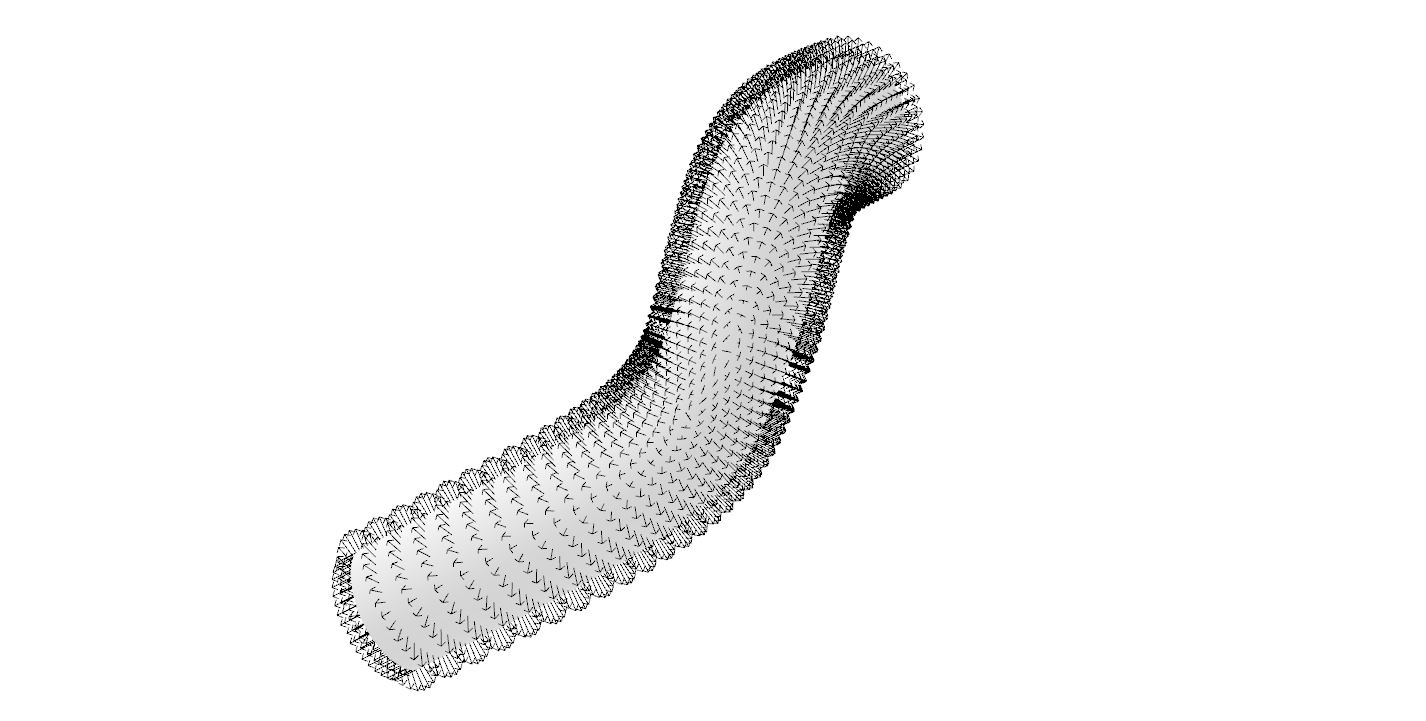
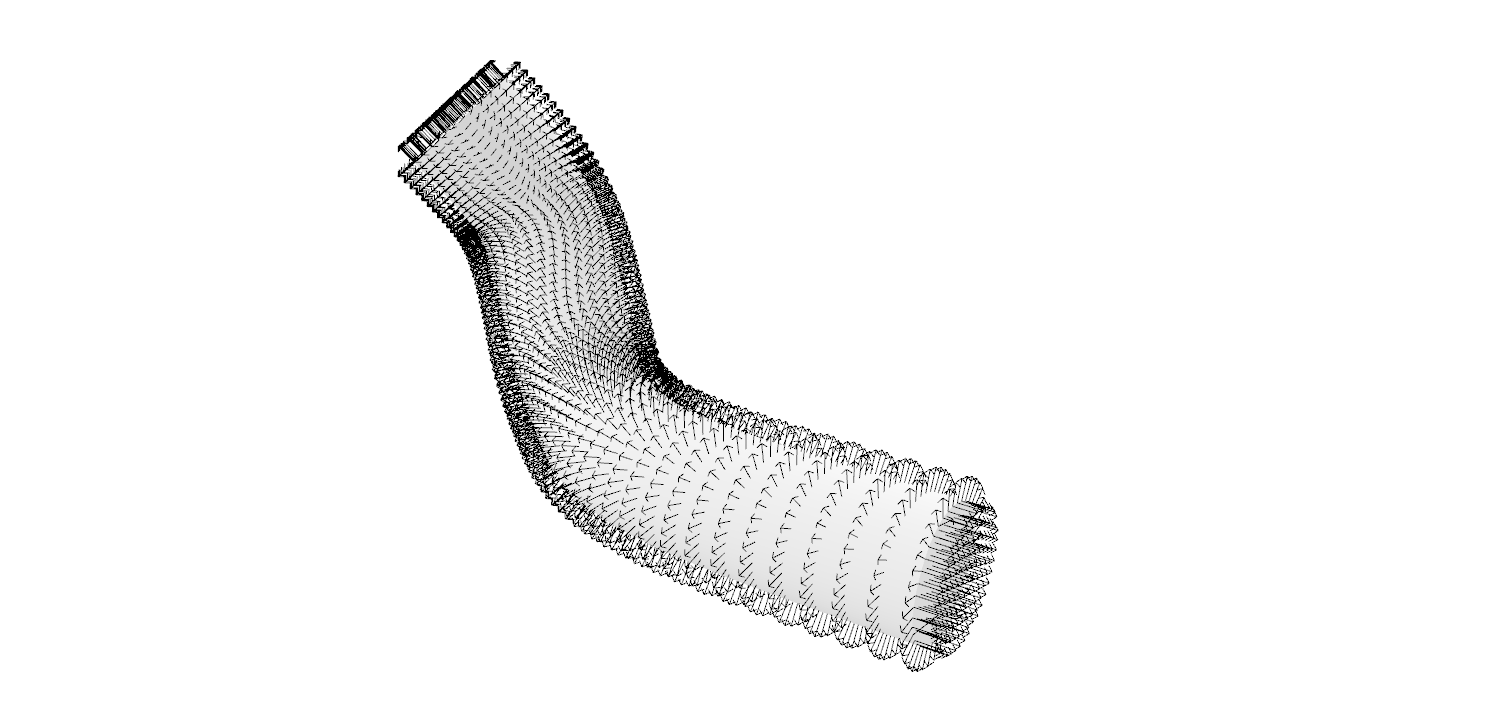
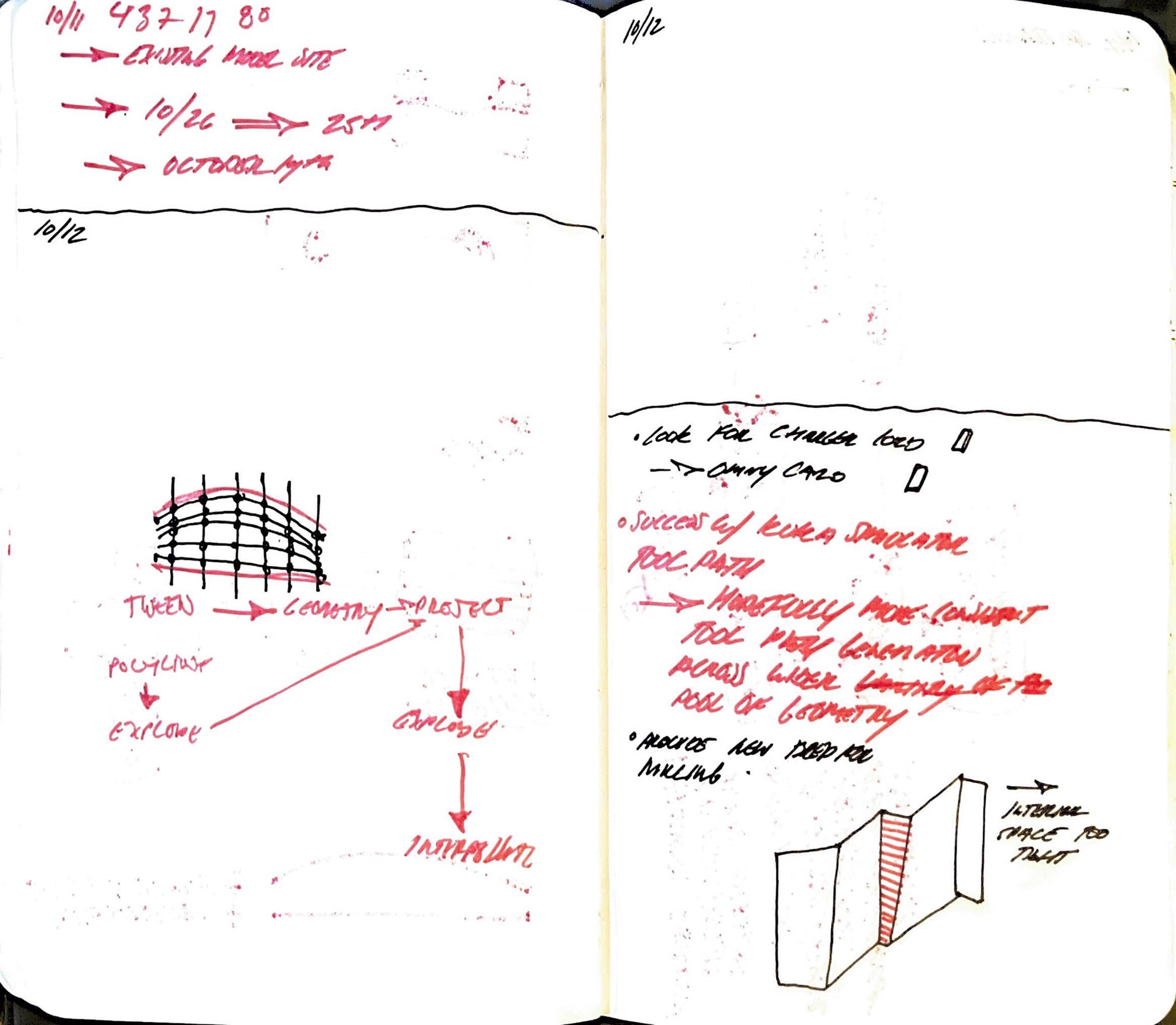
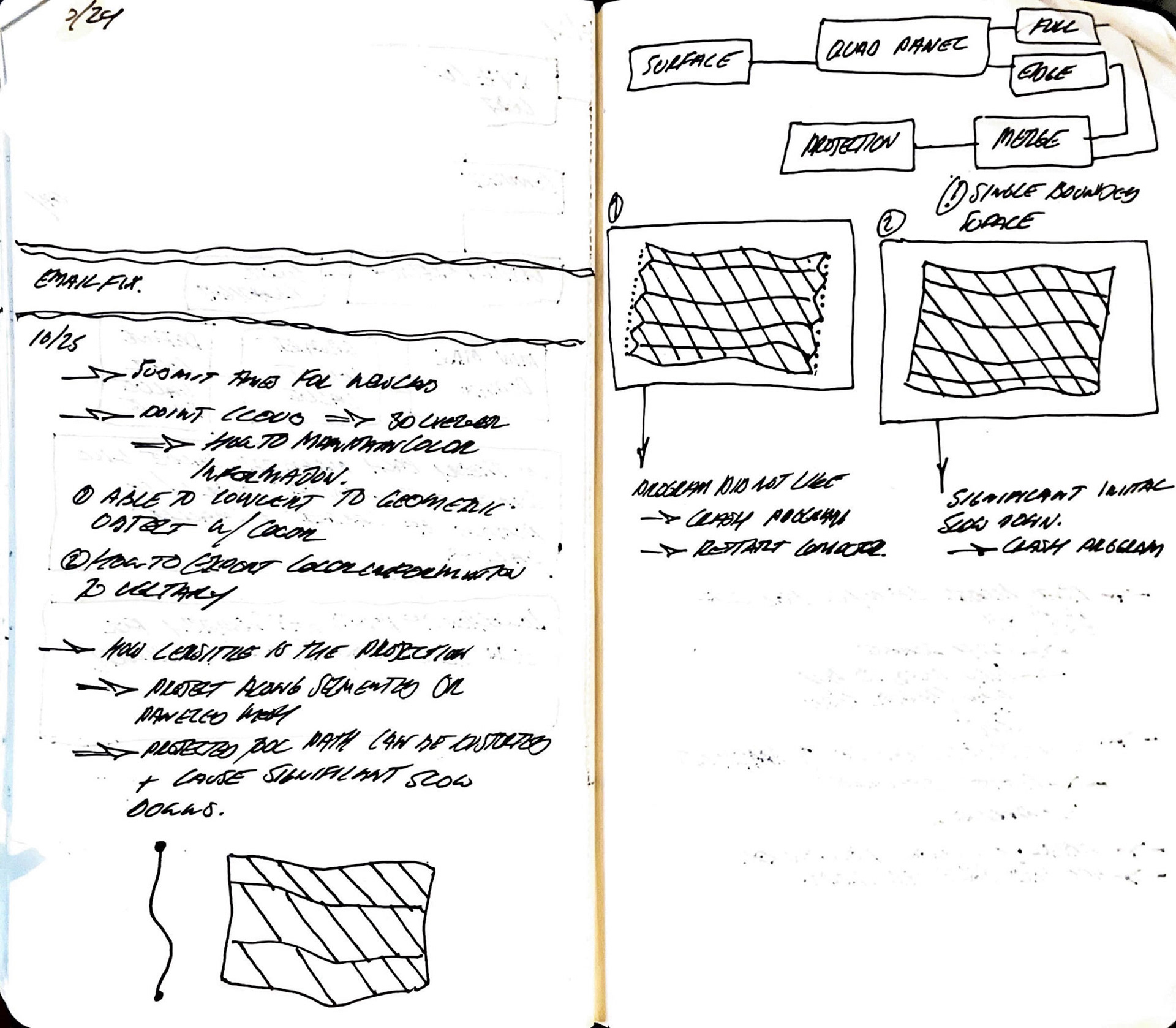
Grasshopper script for extracting and visualizing surface normal information from 3D models

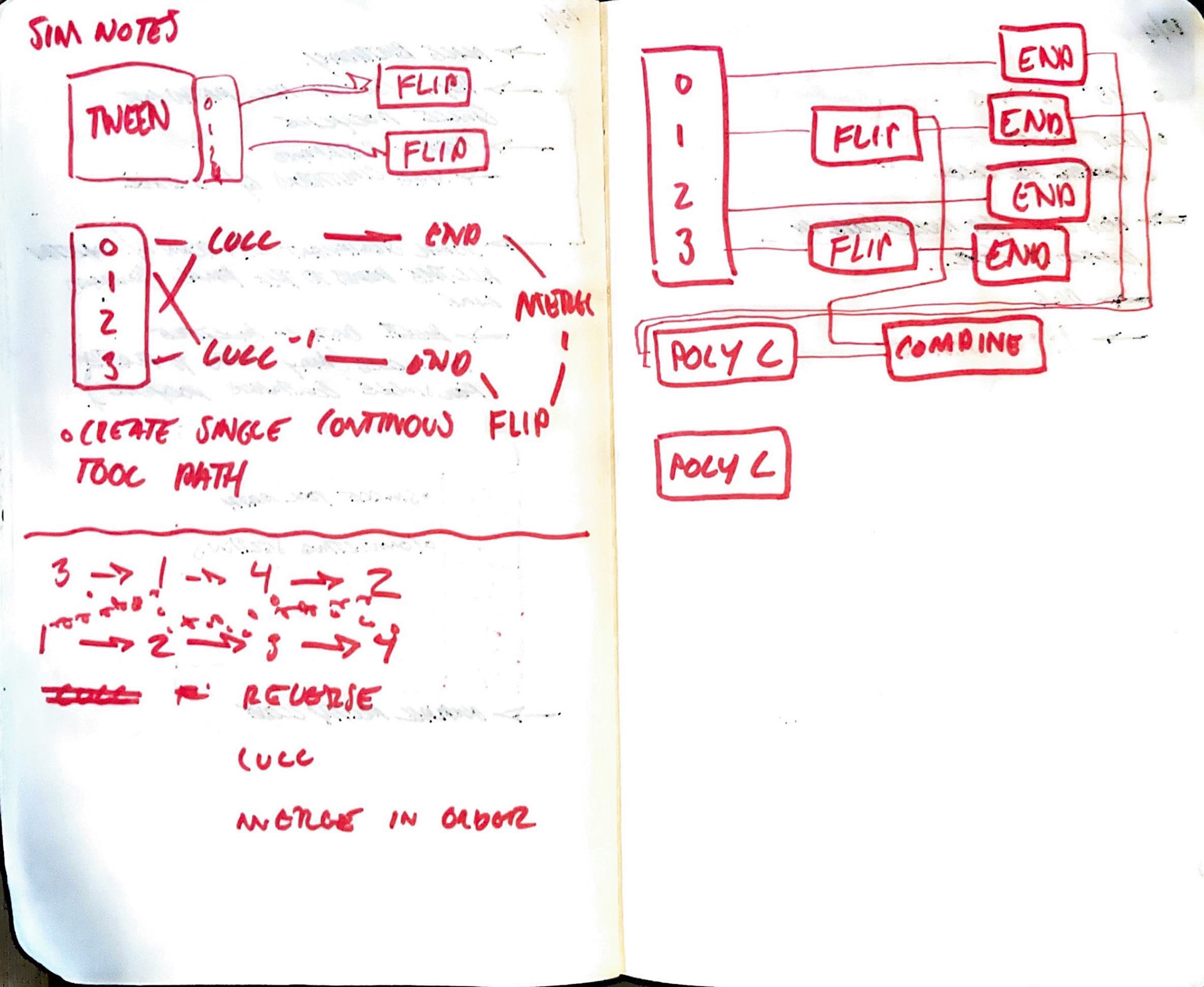
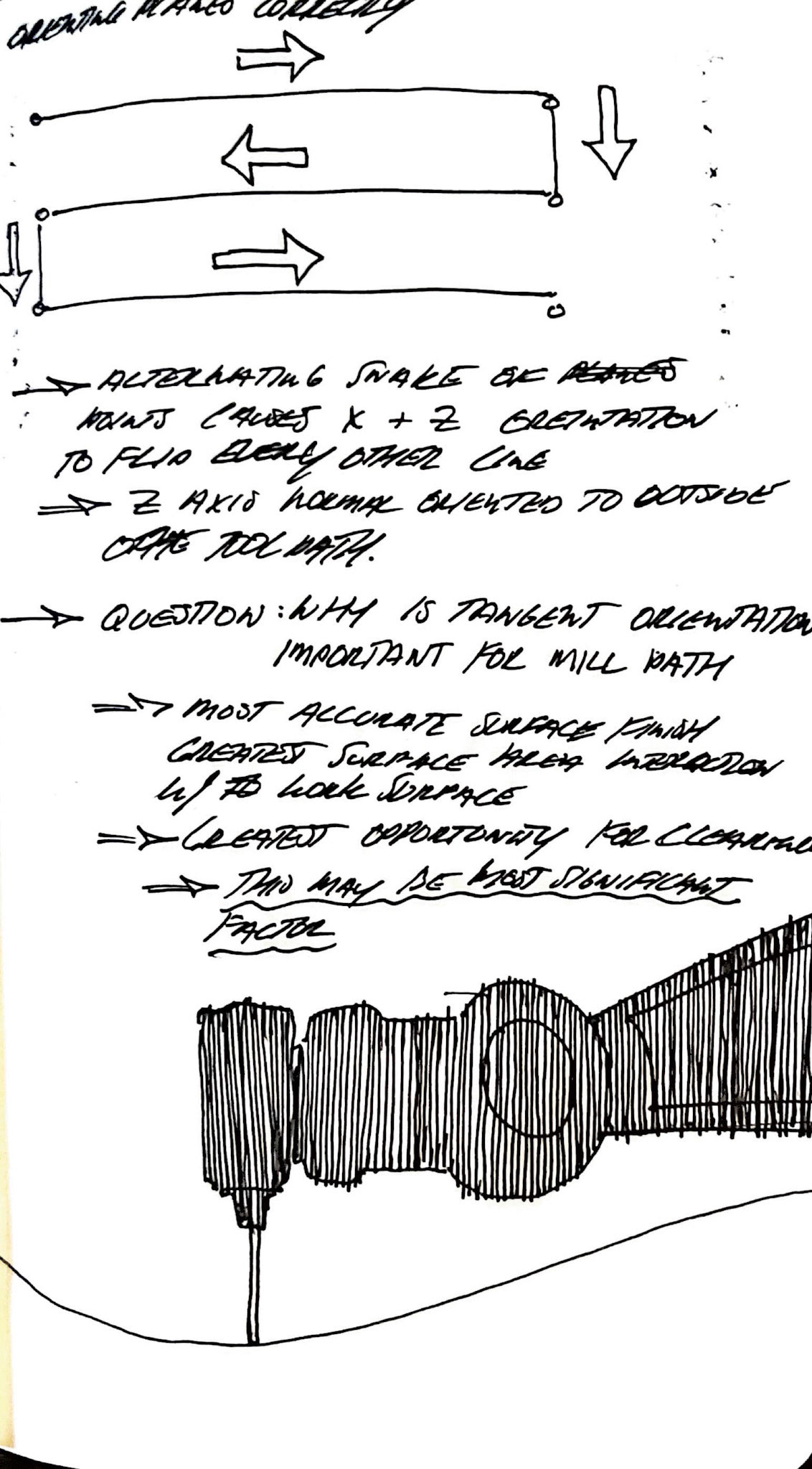
Simulation routing tool path generator